
Der Kongressmonat endet mit einer Gruppe von Neuvorstellungen: sowohl Linux 6.14 als auch CircuitPython 9.2.6 sind verfügbar. Im Hause EtherCat vermeldet man einen neuen Benutzerrekord, während ein inoffizielles Arduino Nano-Board auf Basis eines PIC32MP-Prozessors die Monotonie aufbricht.
CircuitPython 9.2.6 verfügbar
Im Hause Adafruit gibt es ein Wartungsrelease von CircuitPython. Die Version 9.2.6 behebt – wie im folgenden gelistet – kleinere Fehler und / oder Regressionen in der Ausführungsumgebung:
1 |
Fix storage.remount("/", readonly=False) regression. |
2 |
Fix RP2xxx WiFi mDNS limitations. |
3 |
--via https://github.com/adafruit/circuitpython/releases/tag/9.2.6 |
EtherCat: 88 Millionen Knoten.
Der vor allem von Beckhoff vorangetriebene Feldbus EtherCat erfreut sich durchaus beeindruckender Wachstumsraten. Vor wenigen Tagen wurde die Gesamtzahl von 88 Millionen Knoten erreicht, im Jahre 2024 kamen dabei 11 Millionen dazu.
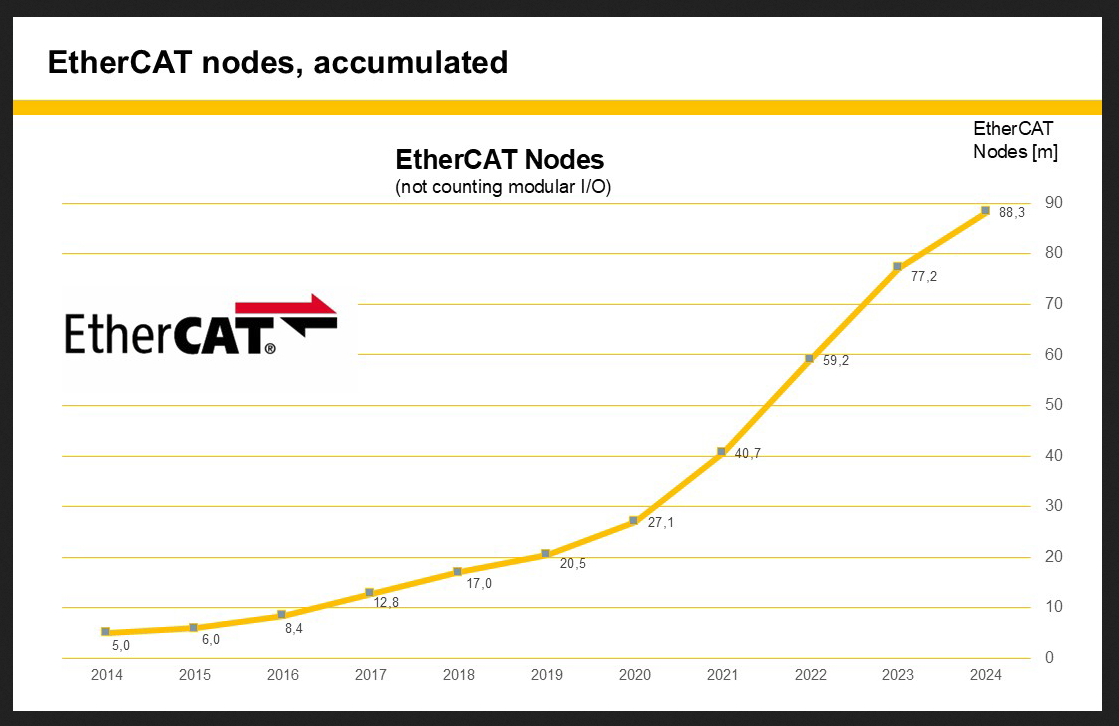
Bildquelle: EtherCat.
Interessant ist an dieser Meldung, dass sich in ihr Informationen über die Art der Zählung verbergen. Besonders relevant ist, dass im Fall von EtherCat die “Lizenzierung“ der Feldbus-Technologie ausschließlich durch den Hersteller der Chips erfolgt; für Nutzer gibt es also keinen zusätzlichen Aufwand:
1 |
Die EtherCAT-Knotenzahlen sind sehr verlässlich, da sie auf den tatsächlichen Chipverkäufen basieren, welche von den Chipherstellern an das Unternehmen Beckhoff Automation, Erfinder der Technologie, gemeldet werden. „Und diese haben keinerlei Interesse daran, diese Zahlen zu übertreiben, schließlich wäre das für sie mit zusätzlichen Kosten verbunden“, erklärt Martin Rostan, Executive Director der EtherCAT Technology Group. Bei EtherCAT ist die Technologie-Lizenz direkt im Chip enthalten, sodass für Gerätehersteller und Anwender keine zusätzlichen Lizenzgebühren anfallen. Mit den Lizenzeinnahmen finanziert Beckhoff die Aktivitäten der EtherCAT Technology Group und damit das Ökosystem rund um die Technologie. |
Renesas DA14533 – Bluetoothmodul für den Automobilbereich.
Mit dem DA14533 erweitert Renesas die hauseigene SmartBond Tiny-Familie. Dabei handelt es sich um Bluetoothmodule, die laut Herstellerangaben nur sechs externe Komponenten benötigen.
Das neue Modell ist für den Automotive-Bereich vorgesehen, was sich unter anderem im vergleichsweise breiten Temperaturbereich ausdrückt.
Zu den sonstigen Spezifikationen vermeldet Renesas folgendes:
1 |
A single external crystal oscillator (XTAL) is used for both active and sleep modes, eliminating the need for a separate oscillator for sleep mode. Its ultra-compact design – available in a WFFCQFN 22-pin 3.5 x 3.5 mm package – makes the device the smallest automotive Bluetooth LE SoC on the market. With its compact design and low eBOM, the device integrates seamlessly into space-constrained systems, reducing overall system costs and accelerating time-to-market for customers. |
2 |
Key Features of the DA14533 |
3 |
• Arm® Cortex®-M0+ microcontroller – Standalone application processor or data pump in hosted systems |
4 |
• 64KB RAM and 12KB One-Time Programmable (OTP) memory |
5 |
• 2.4 GHz radio transceiver |
6 |
• Integrated low IQ buck DC-DC converter |
7 |
• External SPI flash |
8 |
• Single XTAL operation (single crystal oscillator) |
9 |
• Software stack qualified against Bluetooth Core 5.3 |
10 |
• AEC-Q100 Grade 2-qualified with wide operating temperature range support (-40 to +105°C) |
11 |
• WFFCQFN 22-pin 3.5 x 3.5 mm package |
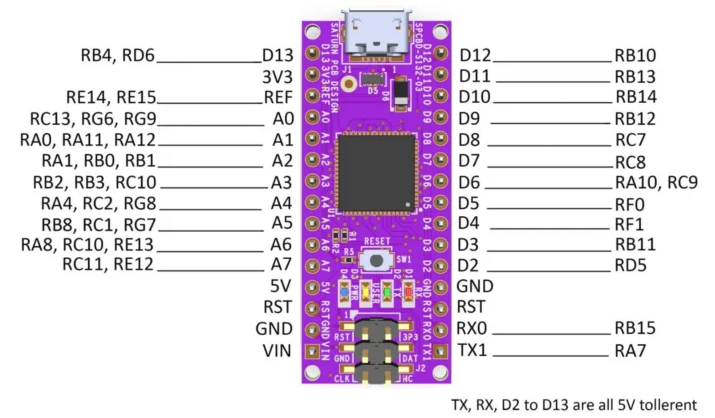
SATURN NITRO – Arduino Nano mit PIC32MK
Der immense Erfolg von Arduino Nano und Co. machte Atmel und die hauseigenen Controller zum König des Hügels. Nach Intels (absichtlichen) Fehlschlägen im Embeddedbereich dauerte es einige Zeit, bis die von der im Arduino-Bürgerkrieg unterlegenen Seite bevorzugte STMicroelectronics zum Zug kam.
In der Praxis kann es immer wieder wünschenswert sein, im Arduino-Formfaktor vorliegende Boards auf Basis „anderer“ Mikrocontroller Familien zu haben. Damit ist der Lebenssinn des SATURN NITRO auch schon beschrieben.
Zu beachten ist, dass die Platine – wie in der Abbildung gezeigt – preislich mit einem „normalen“ Arduino Nano nicht wirklich konkurrenzfähig ist. Auf der Habenseite steht allerdings, dass der Hersteller die Eignung seines Evaluationsboards für den Einsatz unter widrigen Umgebungsbedingungen besonders betont.
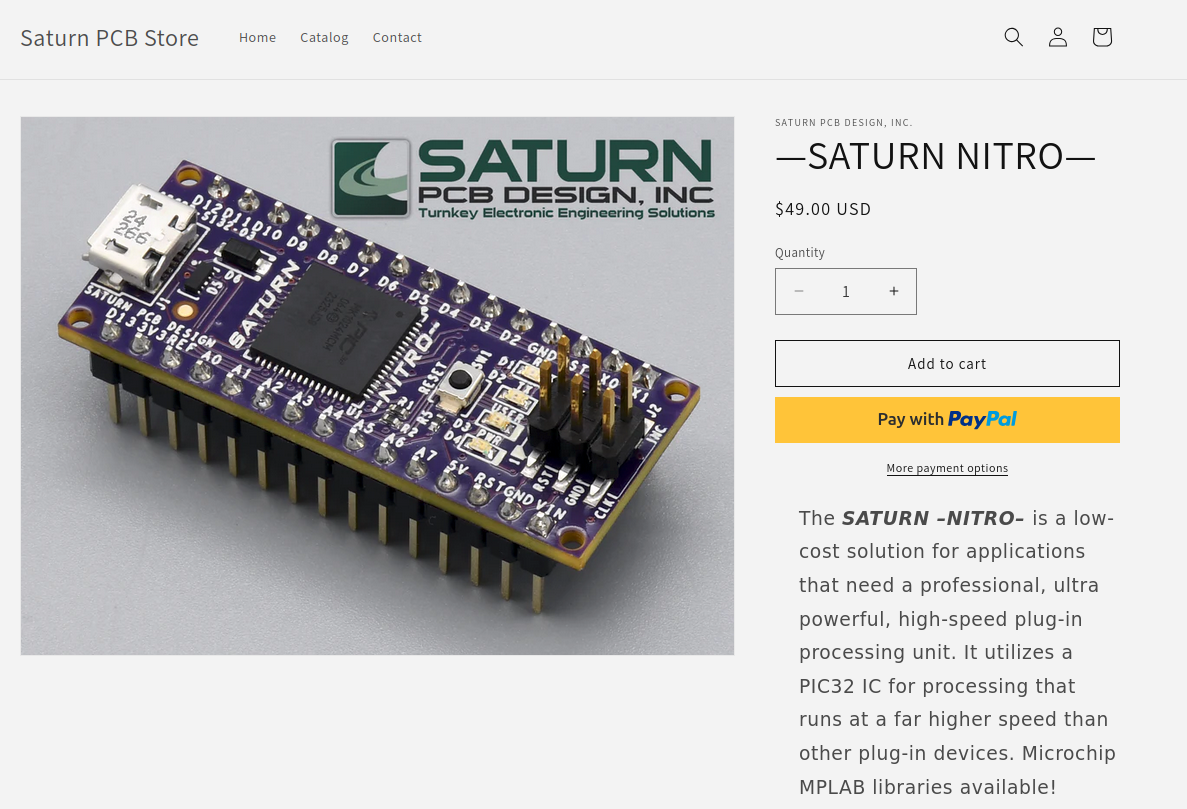
Bildquelle: https://cukedk-zz.myshopify.com/products/saturn-nitro
Radxa CM3J – Alternative zum Raspberry Pi Compute Module 4
Egal wie sehr man mit der mechanischen Umgebung des eines Raspberry Pi herumspielt – ab einem gewissen Grad der widrigen Umgebung ist die Verwendung eines Compute Modules schon aus Gründen der höheren mechanischen Rigidität zu bevorzugen. Im Hause Radxa arbeitet man nun an einer RockChip-basierten Alternative zum großen Vorbild aus dem Hause Upton.

Bildquelle:
https://www.aliexpress.com/item/1005008626884786.html
Zusätzliche Informationen zum Kompatibilitätgrad bietet Radxa in einer FAQ an. Spezifischerweise findet sich da folgende Passage, die auf die „allgemeine“ Kompatibilität hinweist:
1 |
For compatibility of Radxa CM3 with Raspberry Pi CM4, most high speed buses just works such as USB, MIPI, PCIe etc. For the GPIO, since the pin mux is not identical, we can only be compatible with the primary alt function of Raspberry Pi CM4. |
2 |
--- via https://wiki.radxa.com/Rock3/FAQs |
In der Praxis gilt, dass das Umstellen des Compute Modules bzw. des Prozessrechners eine gut durchdachte Frage sein sollte – neben elektronischen Problemen muss man damit rechnen, dass die unterschiedlichen Linux-Distributionen das eine oder andere Haar in die Suppe werfen.
Lesestoff: Compiler-Optimierungsstufe O3 führt nicht immer zu besseren Ergebnissen.
Im Hause Canonical experimentierte man vor einiger Zeit damit, die gesamte hauseigene Distribution fortan mit aktivierter maximaler Optimierung zu kompilieren. Nun veröffentlichte die Truppe ein Resümee, in dem sie auf den Fehlschlag dieser Initiative zur Performancesteigerung eingehen:
1 |
Results of -O3 experiment tl;dr |
2 |
Performance is slightly worse and packages are slightly bigger with -O3 by default and we will revert the change early in the next development cycle. |
Unterm Strich ergab sich eine Anführungszeichen in manchen Bereichen minimale, in manchen Bereichen wesentliche Verschlechterung der Performance, der unter anderem auf die wesentlich höhere Größe der Kompilate (Stichwort Cache-Miss) zurückzuführen war. Weitere Informationen finden sich unter der URL https://discourse.ubuntu.com/t/benchmarking-a-distribution-and-some-o3-results/58027, wo sich eine durchaus lesenswerte Analyse der Gesamtsituation befindet.
Lesestoff: News von Linux 6.14 und Linux 6.15
In der Welt der Weiterentwicklung des quelloffenen Betriebssystems gilt, dass die Zustände “vor dem Update“ und „nach dem Update“ bis zu einem gewissen Grad eine Singularität darstellen.
Sei dem wie es sei, steht Linux 6.14 seit einiger Zeit zum Download bereit. Unter der URL https://www.cnx-software.com/2025/03/25/linux-6-14-release-main-changes-arm-risc-v-and-mips-architecture/ findet sich eine auf die Bedürfnisse von Embedded-Entwicklern zugeschnittene Auflistung der diversen Änderungen.
Unter den URLs https://www.phoronix.com/news/Linux-6.15-SPI-Offloading bzw. https://www.phoronix.com/news/Linux-6.15-PCI finden sich derweil Informationen darüber, welche Änderungen für die Nachfolgeversion ante Portas stehen. Von besonderer Relevanz könnte hierbei die SPI Offloading-Funktion sein – dabei handelt es sich um eine Möglichkeit, um die Verarbeitung von SPI-Daten analog zu einem Smart NIC abseits des Hauptprozessors totzuschlagen.
Zuerst erschienen bei Mikrocontroller.net News
Quelle: Weiterlesen