Die Arduino-Gruppe aktualisiert ihren Bestseller Nano 33 BLE, und erweitert das Ökosystem an anderer Stelle. Renesas kauft seinen Funkmodul-Partner nicht, während Infineon einen neuen PsoC und eine Partnerschaft mit Qt ankündigt. Emteria aktualisiert derweil sein Benutzerinterface – was es sonst zu wissen gibt, verraten wir hier.
Arduino Nano 33 BLE – Version 2 offiziell angekündigt.
Der seit einigen Tagen durch die „Gerüchteküche“ wabernde Arduino Nano 33 BLE Rev2 wurde – wie in der Abbildung gezeigt – soeben offiziell angekündigt.
Bildquelle: https://blog.arduino.cc/2024/02/27/not-bigger-just-better-introducing-the-nano-33-ble-rev2/
Während Formfaktor und Hauptprozessor identisch bleiben, führte die Arduino-Gruppe Optimierungen durch, um eine bessere Fertigbarkeit des Boards zu erreichen. Spezifischerweise stehen die folgenden Änderungen ins Haus:
1
It has a combination of two IMUs (BMI270 six–axis IMU plus BMM150 three–axis IMU) instead of a single, nine–axis one.
2
While retaining the compact form factor, the new Nano 33 BLE Rev2 incorporates new pads and test points for USB, SWDIO, and SWCLK, making it easier to access these crucial points on the board.
3
We introduced a new VUSB soldering jumper on the top side, allowing you to conveniently enable the VUSB pin while using the castellated pins.
4
In addition, the Nano 33 BLE Rev2 transitions the power supply component to the MP2322 to guarantee increased performance.
Laut dem unter https://support.arduino.cc/hc/en-us/articles/11729186296476-Use-the-new-sensor-libraries-for-Nano-33-BLE-Rev2-and-Nano-BLE-Sense-Rev2 bereitstehenden „Umstiegs-Tutorial“ ist die Weiterverwendung von Sketches vom Vorgängermodell im Allgemeinen unproblematisch. Kritisch ist lediglich der Austausch der Bibliotheken für das IMU – laut der Arduino-Gruppe reicht es dabei allerdings aus, das Include #include <Arduino_LSM9DS1.h> durch das Include #include <Arduino_BMI270_BMM150.h> zu ersetzen. Dass an dieser Stelle naturgemäß ein sorgfältiger Test dieser Lösung nicht fehlen darf, sei im Interesse der didaktischen Ehrlichkeit angemerkt.
Arduino: PLC-Ersatz OPTO erhält und besteht Sicherheitsaudit.
Die Arduino-eigene Variante des Themas SPS haben wir in der Vergangenheit unter Beitrag „Arduino OPTA – SPS aus dem Hause Arduino“ detailliert vorgestellt.
Bildquelle: https://blog.arduino.cc/2024/02/29/opta-enhanced-cybersecurity-after-hwg-sababas-testing/
Arduino-Neuerung Nummero zwei ist, dass das ja konsequent für die Cloud-Kommunikation vorgesehene Produkt durch ein Computersicherheitsunternehmen analysiert wurde:
1
To this end, in late 2023 we started a collaboration with global cybersecurity provider HWG Sababa: their Offensive Team engaged in a penetration test that lasted weeks, assessing Opta’s security posture and pinpointing any weaknesses. Their meticulous report allowed us to remedy any vulnerabilities before they became actual issues, and now we are proud to say the Opta is more secure than ever.
Unter der URL https://www.hwgsababa.com/en/case_studies/arduino-cybersecurity-in-automation/ verspricht Arduino außerdem zusätzliche Informationen zum Thema, den versprochenen Testbericht konnte der Autor zum Zeitpunkt der Abfassung dieser Nachricht allerdings nicht vorfinden.
Arduino zur dritten: Neue Version der Portenta Machine Control-Bibliothek „vereinfacht“ Steuerungen.
Dem Hause Arduino gelang in dieser Newsmeldung ein Hattrick: Die dritte Meldung betrifft den an sich seit einiger Zeit im Markt verfügbaren und in der Pro-Linie angesiedelten Portenta.
Die für die Steuerung verschiedener Industrie-Systeme vorgesehene Bibliothek wurde soeben „aktualisiert“ – Spezifischerweise verspricht man die folgenden Neuerungen:
1
Don’t know the Arduino Portenta Machine Control? It’s a versatile industrial control unit offering soft–PLC control, diverse I/O options, and flexible network connectivity. For more information about this product, visit the dedicated page.
2
What you’ll find in the new library
3
• Enhanced library structure: We restructured the library to improve its organization, making it more intuitive. This ensures that you can quickly locate and utilize the functions you need for your projects.
4
• Easier–to–understand names: We standardized function and class names for better consistency and readability. This change ensures a clearer and more understandable codebase.
5
• Optimized efficiency: We eliminated unnecessary functions, decluttering the library and focusing on the essential features needed for effective machine control.
6
• Refreshed and clearer examples: You’ll find reworked examples to showcase the library’s capabilities, providing a better demonstration of the board’s features and of their usage.
7
—via https://blog.arduino.cc/2024/02/28/new-portenta-machine-control-library-boosts-industrial-project-performance/
Wilderness Labs: Stabilitätsverbesserungen für die Meadow-Plattform.
Wer .net-Code in einem Embeddedsystem ausführen möchte, hat wenig Alternative zur Meadow-Plattform. Die vor wenigen Tagen auf den Markt gebrachte Version 1.9 des Produkts bringt vor allem Stabilitäts Verbesserungen, außerdem gibt es fortan auch die Möglichkeit, SPI-Transfers per DMA abzuwickeln und so die CPU-Belastung zu reduzieren. Spezifischerweise präsentiert sich der Change Log folgendermaßen:
1
• Overall Stability – With the last few releases we‚ve knocked out nearly every OS and networking priority–zero issue. In many cases, Meadow.OS should now be stable for weeks or months without issue.
2
• OS Multitasking Stability – We‚ve implemented the Round–Robin thread scheduler which brings a massive upgrade to how the OS manages and switches between threads and brings a new level of stability around Thread and Task operations.
3
• SPI DMA – We’ve added SPI DMA which reduces CPU load when communicating with SPI devices and can lead to a 30% increase in drawing performance with SPI displays!
4
• Unified Meadow.Desktop – Meadow.Desktop got a massive simplification by unifying the launcher between Windows/macOS/Linux, meaning you now only need a single application that will run in any desktop context for full graphics simulation.
5
• Meadow.CLI – The Meadow.CLI got a huge upgrade in its codebase with a complete rewrite focused on stability, consistency, and ease–of–use.
6
—via https://developer.wildernesslabs.co/Meadow/Release_Notes/v1/
Emteria: Redesign der Benutzeroberfläche.
Auch im Hause der Industrie-Android-Distribution Emteria gibt es „Zuwachs“. Spezifischerweise wurde der als Device Hub bezeichnete Geräteverwaltungsdienst mit einem neuen Benutzerinterface ausgestattet, das sich wie in der Abbildung gezeigt präsentiert.
Bildquelle: Emteria.
Interessant ist außerdem eine in der Ankündigung befindliche Passage, die nach folgendem Schema auf das baldige Auftauchen „neuer“ Funktionen für den Cloud-Teil hinweist:
1
The biggest design change in the UI of emteria Device Hub is the move of the navigation bar to the side (1). Not only does this look better but creates more space to introduce new features.
QT for MCU fortan auch auf Infineon-Chips.
Das „QT for MCU“ mit QT eigentlich nur den QML-Parser und den Namen gemein hat, haben wir in der Vergangenheit schon mehrfach besprochen.
Sei dem wie es sei, darf sich das einst von Nokia „verwaltete“ Cross-Plattform-System an einem neuen Opfer erfreuen. Infineon unterstützt das System fortan in den für den Automotivebereich vorgesehenen TRAVEO
-Mikrocontrollern.
Interessant ist außerdem, dass man im Rahmen der Ankündigung nach folgendem Schema die „hohe Entwickler-Produktivität“ betont:
1
By integrating the Qt graphics solution directly into these MCUs, Infineon further optimizes these devices and enables intelligent rendering technology with benefits such as:
2
• Up to 5x more efficient memory usage compared to the market average.
3
• Up to 2x faster boot time compared to average boot times in the market.
4
• Up to 50 percent shorter time to market, from design to production.
5
— via https://www.infineon.com/cms/en/about-infineon/press/market-news/2024/INFATV202403-072.html
Renesas kauft Funkmodul-Spezialist Sequans doch nicht.
Das japanische Halbleiterunternehmen Renesas war in der letzten Zeit unter anderem ob der Übernahme von Altium im Gespräch. In der „Hinterhand“ arbeitete man derweil an einigen weiteren Deals, darunter auch der Übernahme des französischen Funkmodul-Herstellers Sequans.
Laut im Allgemeinen gut informierten Branchennewsdienst RCR (siehe https://www.rcrwireless.com/20240227/internet-of-things-4/deal-off-renesas-249m-takeover-of-sequans-collapses-for-tax-reasons) wird diese Übernahme nun doch nicht stattfinden. Ursache dafür ist eine „negative“ Reaktion des japanischen Finanzministeriums auf die Steuer-Planung im Hause Renesas:
1
Renesas Electronics has terminated its proposed $249 million purchase of France–based cellular IoT module maker Sequans Communications. It said the decision was down to an “adverse Japanese tax ruling”, apparently about the fee it would be required to pay on “taxable gain” after integration of the Sequans business following its purchase.
Infineon: PSoC™ Automotive 4100S Max mit Capsense-Unterstützung.
Auch im Hause Infineon gibt es neue Mikrocontroller: Spezifischerweise arbeitet das Unternehmen an einer neuen Variante des PSoC, der „fortgeschrittene“ Unterstützung für Capsense mitbringt:
1
This microcontroller device family expands Infineon’s portfolio of CAPSENSE™ enabled Human Machine Interface (HMI) solutions for automotive body/HVAC and steering wheel applications by delivering higher flash densities, GPIOs, CAN–FD, and HW–Security.
2
— via https://www.infineon.com/cms/en/about-infineon/press/market-news/2024/INFATV202402-071.html
Interessant ist, dass der Chip auch in einer AEC Q-100-zertifizierten Variante verfügbar sein wird. Die „Basisversion“ ist dabei schon jetzt verfügbar, während die zertifizierte Variante alsbaldig erwartet wird:
1
Infineon’s PSoC Automotive 4100S Max with fifth generation CAPSENSE technology can be ordered now. Start of production for the AEC Q–100 automotive–qualified version is planned for Q1 2024. More information is available at www.infineon.com/autopsoc4100smax
Flux.AI: AI fortan auch zur Generierung von Footprints befähigt.
Die Erzeugung von Footprints ist und bleibt eines der „größten“ Ärgernisse im Leben des Elektronikers.
Der Cloud-basierte PCB-Editor Flux.AI bietet dabei seit einiger Zeit verschiedene intelligente Funktionen an, die Datenblätter auswerten. Mit der vor wenigen Tagen angekündigten Funktion „finalisiert“ man das System – fortan ist es auch möglich, automatisiert Footprints aus Datenblatt-Informationen zu erzeugen.
Bildquelle: Flux.
Alps Alpine: wir verkaufen unsere ICs fortan auch “roh”
Alps Alpine ist unter Anderem für das umfangreiche Portfolio elektromechanischer Komponenten bekannt. Die in ihnen verbauten integrierten Schaltkreise plant man fortan auch “alleinstehend” anzubieten:
1
Munich, Germany, February 27, 2024 – Alps Alpine announced the commencement of external sales of ICs, which were formerly designed and developed only for internal use in in–house manufactured products, under the Alps Alpine brand. As a first step, Alps Alpine has developed the HSLCMB series ICs that incorporate a capacitance measurement circuit and 32–bit CPU to enable capacitive sensing with higher sensitivity and noise robustness than their conventional products and has commenced domestic and international promotions. The HSLCMB series is applicable to a wide range of applications, including touchless operation, automotive touch panels, and liquid level sensors.
2
— via https://www.presseagentur.com/alps/detail.php?pr_id=6935&lang=en
ROHM: Thermodruckkopf mit 3,6 V Betriebsspannung
Rom entwickelt nicht nur Audio-Controller, sondern hat auch eine (durchaus erfolgreiche, aber wenig bekannte) Abteilung, die sich mit Druckköpfen für Thermo-Drucker auseinandersetzt.
Mit dem KR2002-Q06N5AA steht nun ein neues Produkt am Start, das sich von seinen „Vorgängern“ durch die geringere Betriebsspannung und den geringeren Energieverbrauch auszeichnet.
Bildquelle: ROHM.
In der Ankündigung findet sich die folgende Passage:
1
Single–cell Li–ion battery drive allows printers to be made smaller, lighter, and more energy efficient, but drawbacks such as slower printing speed and shorter battery life prevent widespread use. In response, ROHM developed a thermal printhead that can achieve the same print output as a 2–cell drive even with a single Li–ion battery cell.
2
3
The KR2002–Q06N5AA utilizes a radically new structure that breaks away from convention. In addition to optimizing the glaze design (which functions as a heat storage layer) and adopting special low resistance heat elements, the protective film structure on the heat elements was optimized.
4
https://www.presseagentur.com/rohm/detail.php?pr_id=6923&lang=en
STMicroelectronics: Neuer TOF-Sensor mit kinectartiger Auflösung.
Microsofts Kinect machte Tiefenkameras „allgemein“ verfügbar. STMicroelectronics bietet in der ITOF-Produktfamilie seit längerer Zeit verschiedene „Analogons“ an – mit dem neu angekündigten XXX ist man nun in der Lage, Kinect-artige Auflösungen zu erreichen.
Spezifischerweise verspricht STM in der Ankündigung folgende Leistungsmerkmale:
1
Abgesehen von Machine–Vision–Applikationen, eignet sich der VD55H1 ideal für 3D–Webcams und PC–Anwendungen, die 3D–Rekonstruktion für Headsets sowie das Zählen von Personen und die Aktivitätserkennung in Smart–Home– und Smart–Building–Applikationen. Der Baustein bündelt 672 x 804 Pixel auf einem winzigen Chip und kann auf präzise Weise dreidimensionale Oberflächen vermessen, indem die Entfernung zu mehr als einer halben Million Punkte ermittelt wird. Der Stacked–Wafer–Fertigungsprozess von ST mit rückseitiger Beleuchtung erlaubt eine beispiellose Auflösung in Verbindung mit kleineren Chipabmessungen und geringerem Stromverbrauch als alternative iToF–Sensoren auf dem Markt.
Über die Verfügbarkeit wird derweil folgendes vermeldet:
1
Erste Muster des VL53L9 sind für Leitkunden bereits verfügbar, und der Beginn der Massenfertigung ist für Anfang 2025 geplant. Die Produktion des VD55H1 ist bereits in vollem Umfang angelaufen.
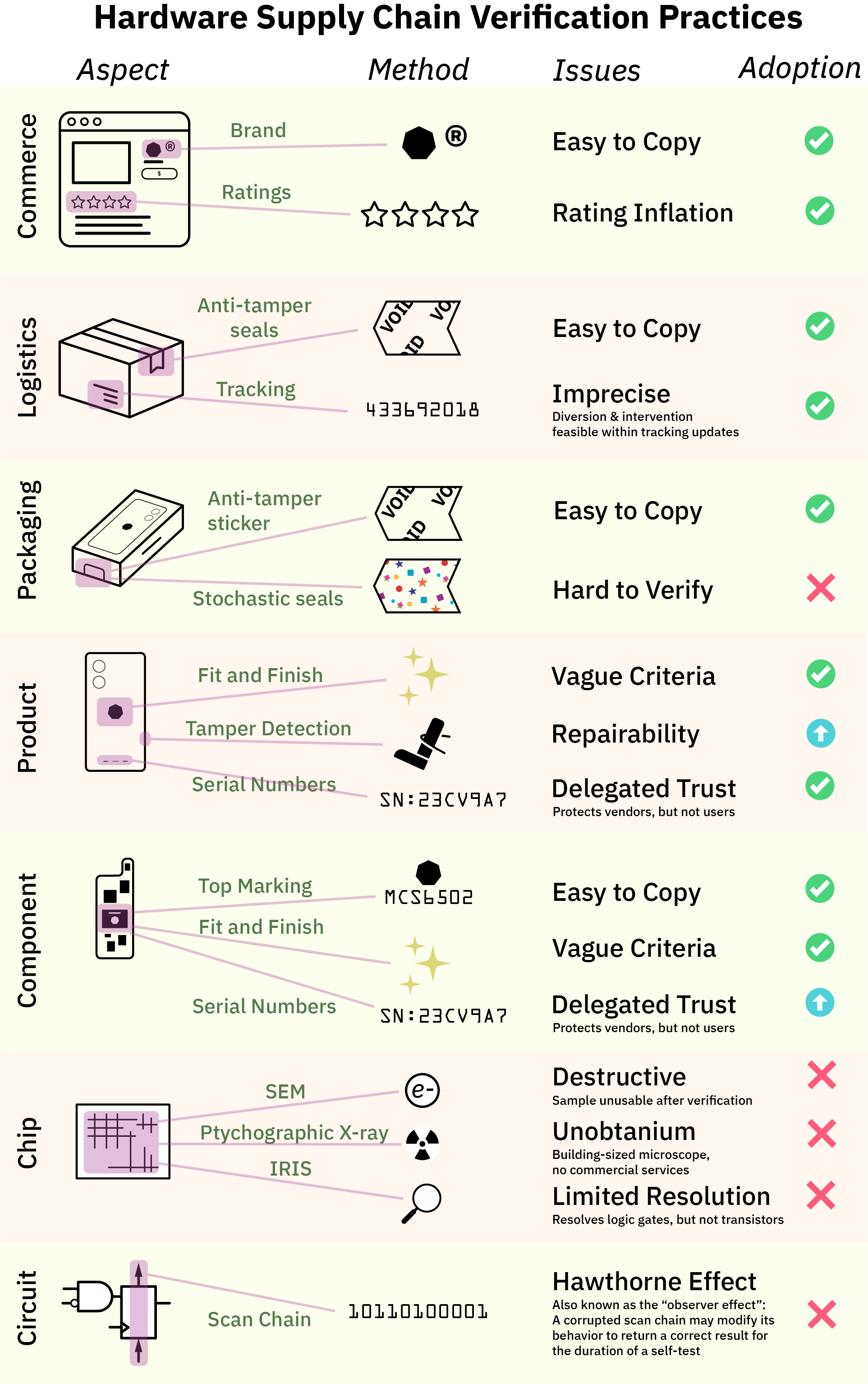
Literatur: Chip-Sicherheit
Zu guter Letzt sei die unter https://spectrum.ieee.org/hardwired-to-self-destruct bereitstehende Liste von Papers erwähnt, die sich mit Methoden zur “Absicherung” des auf Chips befindlichen IP gegen Reverse Engineering auseinandersetzt.
Zuerst erschienen bei Mikrocontroller.net News
Quelle:

{kind=link}
{kind=link}